中国汽车零部件企业在智能网联领域有哪些机会 汽车商业评论
在层、信息融合层、智能决策层、控制执行层都有关键的核心技术供中国企业布局和突破。
经过3个月的紧张筹备,2个月案例的耐心收集,1个月的部分参评企业考察和初审,2016首届铃轩在上海举行了终审及颁典礼。在铃轩12位专业评委的高水准、严要求评选下,本届铃轩共评出发动机类、底盘类、车身类、电子电器类、新能源类、跨国零部件类六大类、17个项,通用类零部件项最终空缺。
在11月29日的“突围之——2016首届铃轩颁典礼暨中国汽车零部件创新论坛”上,铃轩评委、上海交通大学汽车工程研究院副院长殷承良发表了主题。他认为,在智能网联汽车核心零部件技术领域,层、数据采集层、智能决策层、控制执行层都有可待挖掘的细分市场,比如激光雷达、毫米波雷达、摄像头、超声波雷达、红外热成像仪、GNSS/INS等传感器,亟待降低成本或提高精度,这些都是中国零部件企业的机遇。
关于汽车零部件,我们讲的大多是基于传统汽车的。传统汽车零部件永远是根基,今天几位的所说的关于做大、做强思都常正确的,我想再延伸一步讲讲对未来汽车的思考。
智能网联是未来汽车重要的一个发展趋势,体现在电动化、智能化、网络化和信息化四个方面。贾可博士的“汽车四化”还包括共享化,共享化我是这样理解的,那是车外的事,已经是商业模式而不是汽车本身的事。关于智能网联,我们讲的是汽车本身有这样的发展趋势,这点也是业界的共识。
智能网联汽车领域衍生出众多概念,如车联网、高级辅助驾驶、无人驾驶、智能汽车、互联网汽车等。对于智能网联汽车的定义也各不相同,实际上从汽车零部件的角度出发,我们认为这是一个最重要的发展。在传感器、控制器、执行器方面加入了非常多跟传统汽车不同的元素,解决的是更复杂的汽车行驶问题。

![]()
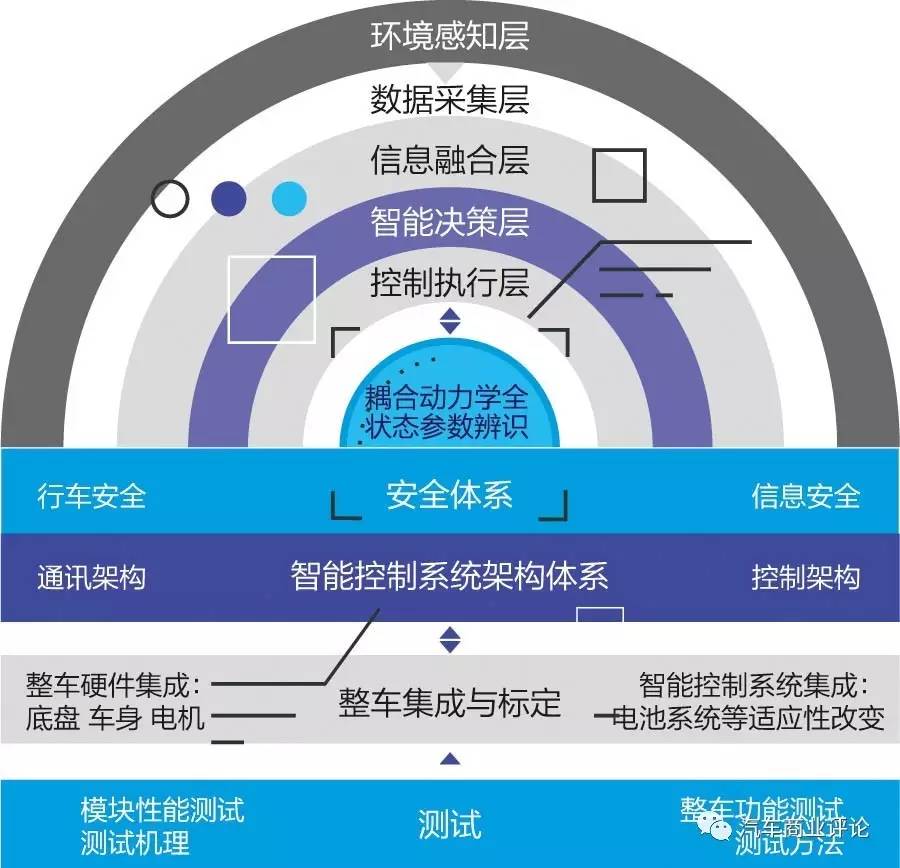
在其中,“高级辅助驾驶”可以说是智能化、网联化的第一阶段。现在有非常多的细分功能出现,包括盲区监测、疲劳监测、车道偏离、自适应巡航、自动泊车等。这些功能大致可以分解为、信息融合、智能决策、控制执行四个层面。
以自适应巡航、车道保持、自动泊车为例,通过雷达、车速传感器、摄像头进行,把对于周边车辆、车道线、障碍物等识别提取出来,这是信息融合。
接下来判断如何进行机械化、智能化方面的操作,包括决策、预警、径规划,这些方面是智能决策。
我们可以看到,与传统汽车所不同的是,层新增加了太多零部件,包括侧系统、卫星、红外测距、摄像头、激光雷达、毫米波雷达、超声波雷达等。
它们将采集到的数据进行信息融合时,还需要有精准的定位、新的场景重构、行人和障碍物的识别、车辆的识别等。
不仅仅是静态的识别,能够判别它是车、是、是人,还要判别它的行为是什么——也就是说对车突然转向、人横穿马等动态行为的判别。
有了这一步我们才能做径的规划,才可以考虑是机械驾驶还是人类驾驶,再发出指令进行自动驾驶的驱动、制动、转向等。再结合车辆的耦合动力学关系,共同构成了我们智能化、网联化汽车新增的功能。

另外还有一个很重要的安全体系,传统汽车更多关注的是行车安全(safety),ABS、ESP等防碰撞技术,现在还要重视信息安全(security),在这里我要特别强调,它应该和传统汽车进行完美融合。
很多IT业进入这个行业,把汽车当成黑匣子,想做智能化控制——老实说这样做样车玩玩可以。很简单,如果冰雪打滑,突然道识别要求转向避让,与整车配合不好的话,一打滑反而会撞到人。
这些新增的零配件和功能一定要和传统汽车控制完美结合,整个控制系统如何整合很重要,还有模块性能和整车功能的不同测试也是我们要解决的。
什么是智能化的控制?我本人的观点,它无非就是汽车电子控制更深一步的延伸,它仍然是ECU,仍然是传感器,仍然是控制器、执行器,但是它赋予了新内容,并且有周边大量的网络和侧的。
![]()
首先在智能网联汽车的系统层面,新增的传感器有激光雷达、毫米波雷达、超声波雷达、单目/双目摄像头、红外热成像仪、GPS/INS组合单元及传统汽车原装传感器等。多种传感器各有优势与劣势,相互补充形成对周围的精确。
激光雷达可以说是目前智能汽车最重要的传感器,国际上比较有名的激光雷达厂商有Velodyne Lidar,Ibeo LUX,Quanergy S3,国内有北科天绘、速腾聚创,禾赛科技等。其优势是分辨率高、测速范围广、测量距离远、抗干扰能力强,劣势是价格昂贵、受天气影响大。
毫米波雷达是另外一个非常重要的智能化零部件,这一部分相对是“低成本”的,某种意义上比激光雷达还重要,基本上是现在智能车上必不可少的。
德尔福、博世、在毫米波雷达上都有模块的出来。根据24G及77G雷达探测的特点,整车上一般配置一个77G雷达用于长距离探测和自动巡航控制(ACC),2-6个24G雷达用于短距离探测。
与超声波雷达相比,毫米波雷达具有体积小、质量轻、空间分辨率高的特点;与红外、激光、摄像头等光学传感器相比,毫米波雷达穿透雾、烟、灰尘的能力强,具有全天候全天时的特点。毫米波雷达的抗干扰能力也优于其他车载传感器。
超声波雷达是采用频率高于20000赫兹的超声波实现测距、测速的传感器,多被用于倒车雷达,不过随着智能网联汽车的发展,超声波雷达的用途将会大大扩展。
车载摄像头,跟机的摄像头不一样,讲究更精细、数字化,能从中得到数据,这才是我们最关注的,也是跟普通机最大的不同。
相比于其他传感器,摄像头信息更加丰富,在场景三维重构、行人、车辆识别等领域均有应用,当前,一大批创业公司围绕视觉系统开展智能网联汽车技术研究与应用。
以色列的Mobileye在单摄像头视觉高级驾驶辅助系统的开发方面走界前列, 其技术被宝马、通用、沃尔沃、现代等多家全球汽车公司应用于生产的车辆中。
国内的中科慧眼等公司采用双目摄像头,搭载视差计算及障碍物检测算法,可实现车道偏离、车道保持辅助、前车防撞预警以及行人探测与防撞警示等功能。
红外热成像仪是利用目标和背景或目标各部分之间的辐射差异形成的红外辐射特征图像来发现和识别目标。它的探测能力强,在夜间、冰雪或者极端下也不受干扰,可以解决在可视条件差的情况下对行人、动物的有效识别,对智能网联汽车障碍物识别有重要补充作用。
除了GPS,现在的定位装置还有多模卫星定位(GNSS)、惯性(INS)。GNSS更新频率低,易受干扰,但是定位误差不会积累;INS更新频率高,但是误差会随时间累积。两者结合,优势互补,实现智能网联汽车所需的高精度定位。
不仅是卫星本身,另外还有一个重要的是——地面差分基站。基站实时将载波相位修正值和基站准确坐标通过无线电设备一同传输给用户站建立载波相位差分观测模型,并给出厘米级定位结果。
在中国,定位装置只能基于北斗系统去做,但所有卫星自己的定位精度只有10米左右,要想让精度达到分米级、厘米级就不得不借助地面差分基站。
可以想象在中华人民国土地上不会允许美国的GPS来建基站,也不允许欧洲的Galileo和俄罗斯的GLONASS建基站,只能北斗GPS建地面增强基站,这是国家战略,我们的根基一定是北斗,然后可以用其他的卫星作为辅助。
![]()
车联网通信有两种重要的技术线,一个是美国提出的DSRC,基于802.11p协议和一系列相关协议的V2X技术,经过10年研发测试已于2014年基本定型,欧洲、日本也有相关变体标准。
另外是中国的基于移动蜂窝基站的LTE-V技术,覆盖范围大,虽然时间节点上落后于DSRC,但可依托成熟的基础设施建设和国内企业的领先技术,使用现有的基站和频段,组网成本低。
从自主知识产权和信息安全角度考虑,国内的LTE-V技术更具有潜力,今年底之前我们国家自己的LTE-V标准就会制定出来,华为也于近期宣布完成了面向5G三大商用场景(eMBB,uLLC,mMTC)的外场测试。
网联设备对车联网技术的应用具有重大意义,我国在LTE-V网联设备的研发应用上扮演着重要角色。
华为、大唐、东软等IT企业在车载互联终端及侧系统方面开展了大量研究工作,在车联网技术及其应用方面已经取得一系列,很多国内的企业现在都有核心的技术,比如东软的Vtalk开发套件,华为的ME909T车载模块,大唐基于3GPP的LTE-V网联设备。
智能网联汽车还极大提高对汽车控制系统数据处理能力的需求。此前,各大公司的智能网联汽车控制系统都由藏在后备箱里的大控制箱作为硬件载体。
目前为止,互联网企业进军控制器领域的最多,离成熟还有很长的距离。如果不跟汽车紧密结合,是会有问题的。还有图像方面的处理,基于视觉推出来的自动驾驶平台可能常重要的控制系统。
智能控制系统轻量化、小型化发展需求日益强烈,未来智能车技术必将平台架构化解决方案。NVIDIA、恩智浦、Kalray都陆续推出了针对自动驾驶汽车的平台架构解决方案。
在执行器方面,执行机构线控化是智能驾驶的必要条件,未来汽车的三大执行系统(驱动、制动、转向)都将采用线控化方案,从传统的液动变为线控液动,从集中式驱动转变为分布式轮毂驱动,从机械转向优化为线控转向机械备份。这些都不是新概念,但用在智能网联汽车上是一个全新的产品。
线控技术(X-by-wire)源于飞机控制系统,将驾驶员的操作动作经过传感器转变成电信号,通过电信号网络传输并功率放大进而推动执行机构。它采用电子信号代替有形连接,反应更迅速,便于实现智能控制。
![]()
最后我们说一说机遇和挑战。事实上在新增的领域,有太多空间可以给我们零部件企业布局。
比如传感器方面,智能网联汽车尚未达到大规模产业化要求,供应格局尚未形成,Velodyne的64线万元,亟待降低成本或提高精度。
诸如摄像头、夜视系统、雷达等核心技术仍掌握在国外零部件手中,国内相关技术研究起步晚,不过仍有赶超机会,核心技术攻关以及替代技术研发仍将是国内汽车产业的重大机遇和挑战。
在智能网联汽车领域,国内外零部件公司多关注单一传感器系统,多传感器信息融合系统解决方案相对较少。
实际上,单一传感器很难实现智能网联汽车高稳定性、高精度的,多传感器信息融合系统才是智能网联汽车的关键,相关技术发展尚未成熟,国内企业让有较大产业化机会。
很多人关注的是传感器本身,但是我要说,从传感器、到信息融合到执行器,方方面面的硬件软件都是零部件供应商的机会。
国内控制器硬件发展相对滞后,但国内互联网、IT企业实力强大,有望在智能网联控制系统软件实现产业突破。
在车联网侧系统,已经不仅仅是车本身,道上也需要太多的模块,每一个信号灯都会是未来的机会,及早布局非常重要,系统解决方案的供应商也是未来一个重大的发展方向。
网络方面,最重要的就是信息安全,我们原来是讲防病毒的企业360,现在都在布局到汽车网络安全里面。
在这里,我非常荣幸讲这么一个小案例,这个叫Keen Team的团队现在加入到腾讯,更名为科恩实验室,主要全是上海交通大学网络安全专业的毕业生,今年9月以“远程无物理接触”的方式成功入侵特斯拉汽车。
我亲眼看到他们做这个实验,车开着开着后备箱打开,车开着开着突然转向了。特斯拉从Google、微软和苹果等公司挖来工程师组建安全团队,专门负责产品安全分析和漏洞修复等工作,依然被挖出严重漏洞。
另一方面,我也很特斯拉,他们仅仅用了10天时间,对全世界的特斯拉进行了网络升级,这是普通汽车厂想都不敢想的事。
我一直认为产业做大和做强,完全不是同一个时空的。什么意思?产品做大的时候,一定不是做强,做强的产品就是获取第一桶金、赚取超额暴利的时候那才是强的。这个强哪怕是100多人的小公司,可能没有很强的管理系统,但是它仍然是技术领先。
我的思是这样的——我们为什么一定非要等到做大?能不能一开始就利用新技术、新产品想办法做强?这是很重要的事情。
像汉能的太阳能汽车,不知道要到猴年马月才能量产,但是他们有一个新思,早在2013年就并购了美国的薄膜太阳能企业实现了技术革新,后面怎么做呢?先做100辆卖给王健林的儿子,卖给我们互联网的老板们,卖给最牛的大佬们,完全订做,每辆车都有个人的名字,都搭载了最智能的技术。
卖完100辆再做1000辆,一两年以后,1000辆卖完再做10000辆,这就是特斯拉走的老。它的Roadster刚开始就是100辆,等到第三代出来是卖几千辆。从一开始100多人的公司到现在万人公司,滚动式发展。
我的思是别光只想着做大,不妨在某些领域先做强,通过收购或者参股的形式获取新的技术,这样零部件企业也有机会。(节选自首届铃轩颁典礼上殷承良,ABR记者张硕整理)


